Swarm Intelligence Workbook
[1]:
import numpy as np
This tutorial explains canonical two particle swarm optimisation (PSO) algorithms, namely gbest and lbest. Implementations are made with reference to Fundamentals of Computational Swarm Intelligence by Engelbrecht and Andries.
To begin, let’s set up some parameters and types:
[2]:
N: int = 100 # Number of particles
D: int = 2 # Size of each particle
T: int = 60 # Number of iterations
from typing import Literal
type Swarm =\
np.ndarray[tuple[Literal['N'],
Literal['D']],
np.dtype[np.int32]]
type Particle =\
np.ndarray[tuple[Literal['D']],
np.dtype[np.int32]]
In very broad strokes, a PSO algorithm maintains a swarm of “particles”. Given the problem, each particle represents a solution in an abstract space. The algorithm optimises by moving these particles around, hoping that one finds a solution that better solves the problem.
Define the Swarm
Define variable X that represents the swarm. X is a \(N\times D\) matrix, where X[]n] is the \(n^{\mathrm{th}}\) particle and X[n][d] is the \(d^{\mathrm{th}}\) item in that particle. Define Y to store “personal bests”, such that Y[n] is the personal best of X[n].
Also, define variable X_T that records the history of X. Each X_T[t] should be X at time step t. Similarly, define Y_T for Y.
[3]:
from typing import Callable, Any
# The domain of Any, Any is hard-coded according
# to D=2.
INITIALISER: Callable[[int, int], float] =\
lambda _1, _2: np.random.uniform(low = -10, high= -8)
X: Swarm = np.fromfunction(np.vectorize(INITIALISER),
shape=(N, D),
dtype=float)
Y: Swarm = np.copy(X)
V: Swarm = np.zeros(shape=(N, D),
dtype=float)
X_T: list[Swarm] = []
Y_T: list[Swarm] = []
Problem and Measure of Success
Define the objective function OBJECTIVE to capture the problem. Also define is_better_than, a way to compare two fitnesses. The fitness describes how well the solution solves the problem.
The artificial life / evolutionary computing community tends to model with maximisation problems. This choice is arbitrary.
[4]:
import ograph.ofunc as ofunc
OBJECTIVE: Callable[[Particle],
float] =\
lambda x: -ofunc.rosenbrock(*x)
is_better_than: Callable[[float, float],
bool] =\
lambda x, y: x > y
Define the Algorithm
here you go.
[5]:
# Initialising y_hat to X[0] is arbitrary.
# Would be typely-correct to use `Optional`, but one
# can't be correct all the time.
y_hat: Particle = X[0]
fy_hat: float = OBJECTIVE(y_hat)
y_hat_T: list[Particle] = []
fy_hat_T: list[float] = []
assert X.shape == (N, D)
assert Y.shape == (N, D)
assert V.shape == (N, D)
C_1: float = 1
C_2: float = 1
for _ in range(T):
# For each iteration:
# For each particle in swarm:
for i in range(N):
fy_i = OBJECTIVE(Y[i])
fx_i = OBJECTIVE(X[i])
if is_better_than(fx_i,
fy_i):
Y[i] = X[i]
fy_i = fx_i
if is_better_than(fy_i,
fy_hat):
y_hat = Y[i]
fy_hat = fy_i
for i in range(N):
for j in range(len(V[i])):
r_1j: float = np.random.uniform(0, 1)
r_2j: float = np.random.uniform(0, 1)
V[i][j] = V[i][j] +\
C_1 * r_1j * (Y[i][j]-X[i][j]) +\
C_2 * r_2j * (y_hat[j]-X[i][j])
X[i] = X[i] + V[i]
X_T.append(X.copy())
Y_T.append(Y.copy())
y_hat_T.append(y_hat)
fy_hat_T.append(fy_hat)
Visualisation
OPlot provides a comprehensive set of tools to visualise
Plot Past Solutions
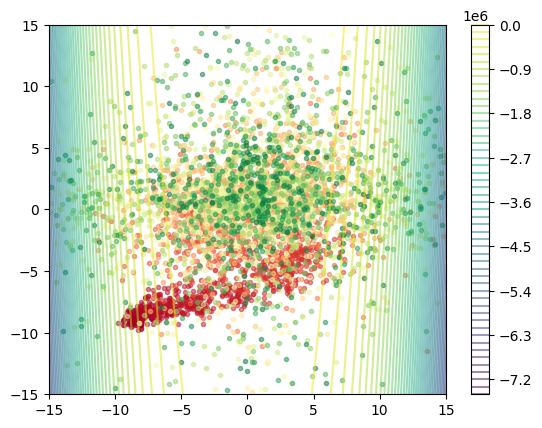
Plot past values of X. Recall that X_T[t] is X[t] at time t.
[6]:
from ograph.swarm import plot_positions, plot_fitnesses
mort = np.array(X_T)
plot_positions(mort[:,:,:],
lambda x, y: OBJECTIVE((x, y)),
override_region=((-15, 15), (-15, 15)))
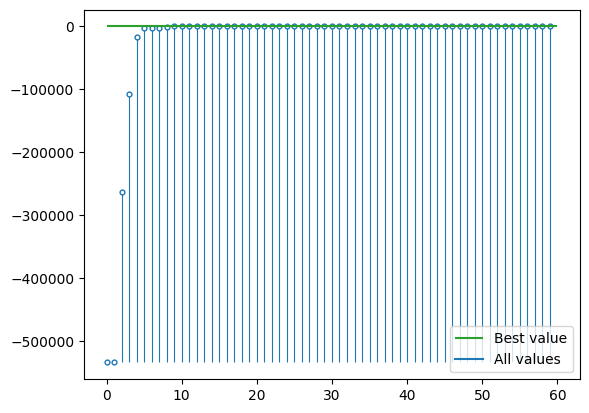
Plot Past Fitnesses
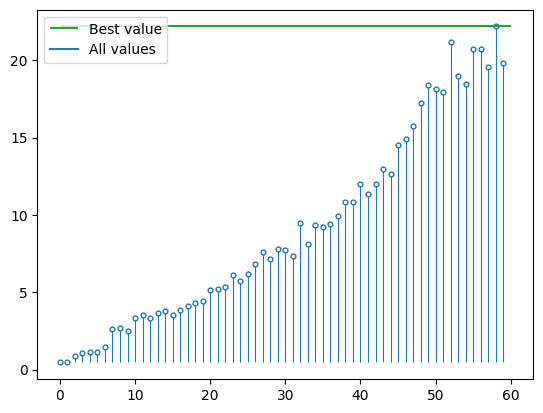
Plot past values of \(f(\hat{y})\).
[7]:
plot_fitnesses(fy_hat_T)
Prepare types of arrays and matrices.
[8]:
from typing import TypeAlias
ArrayND: TypeAlias = np.ndarray[tuple[Any, ...],
np.dtype[np.float64]]
Plot Other Metrics
[9]:
from typing import Optional
import numpy as np
from scipy.spatial import ConvexHull
from scipy.spatial.distance import cdist
def diameter(data: ArrayND,
metric: Optional[str
| Callable[[ArrayND, ArrayND], np.float64]] = 'euclidean')\
-> np.float64:
"""Compute the diameter of :arg:`data` according
to the :arg:`distance` measure. Returns two points that produce
this diameter.
The diameter of a set of points is the maximum
distance between any two points in the set.
Args:
data: A collection of points, where :code:`data[i]`
is the ith point.
distance: A measure of distance. Defaults to
the L-2 norm. Given to :meth:`scipy.spatial.distance.cdist`.
"""
chull: ArrayND = data[ConvexHull(data).vertices]
dists: ArrayND = cdist(chull, chull, metric=metric) # type: ignore
# Fix this
return dists.max()
[10]:
from typing import Sequence
from ograph.oplot import Vec1D, Vec2D, Vec3D
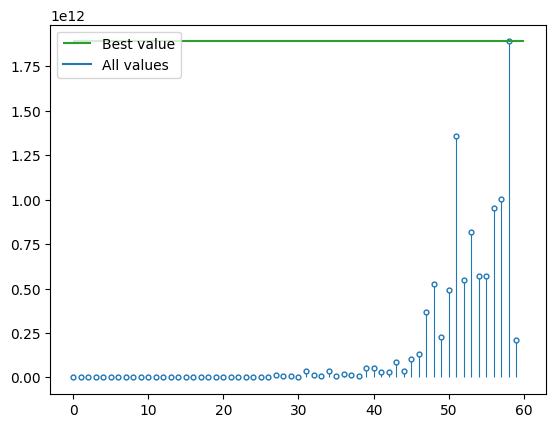
Define the potential energy of the swarm:
[11]:
def potential_energy(X: Swarm, ideal, epsilon):
return np.sum([np.abs(OBJECTIVE(x) - ideal) / epsilon for x in X])
[12]:
plot_fitnesses([potential_energy(X, ideal=0, epsilon=0.1) for X in X_T])
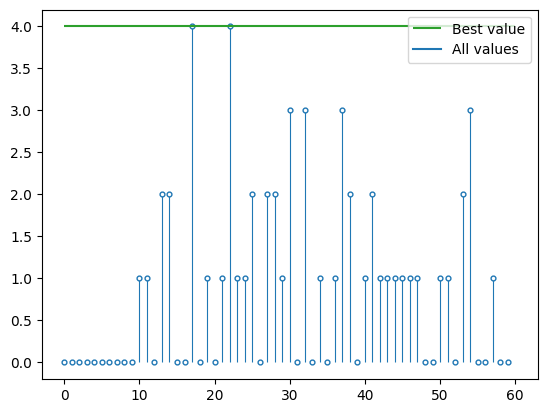
[13]:
def reliability(X: Vec3D, ideal, epsilon):
return np.sum([1 for x in X if np.abs(OBJECTIVE(x) - ideal) < epsilon])
plot_fitnesses([reliability(X, ideal=0, epsilon=4) for X in X_T])
[15]:
def diversity(X):
_summand_n = 0
for n in range(X.shape[0]):
bucephalus = X.mean(axis=0)
_summand_d = 0
for d in range(X.shape[1]):
_summand_d += (X[n][d] - bucephalus[d]) ** 2
_summand_n += np.sqrt(_summand_d)
return _summand_n / X.shape[0]
plot_fitnesses([diversity(X) for X in X_T])
[16]:
def reliability(X: Vec3D, ideal, epsilon):
return np.sum([x for x in X if np.abs(OBJECTIVE(x) - ideal) > epsilon])
[ ]:
# Extract the points forming the hull
# Naive way of finding the best pair in O(H^2) time if H is number of points on
# hull
hdist = cdist(hullpoints, hullpoints, metric='euclidean')
# Get the farthest apart points
#Print them
print([hullpoints[bestpair[0]],hullpoints[bestpair[1]]])
---------------------------------------------------------------------------
NameError Traceback (most recent call last)
Cell In[17], line 6
1 # Extract the points forming the hull
2
3
4 # Naive way of finding the best pair in O(H^2) time if H is number of points on
5 # hull
----> 6 hdist = cdist(hullpoints, hullpoints, metric='euclidean')
8 # Get the farthest apart points
9
10
11 #Print them
12 print([hullpoints[bestpair[0]],hullpoints[bestpair[1]]])
NameError: name 'hullpoints' is not defined
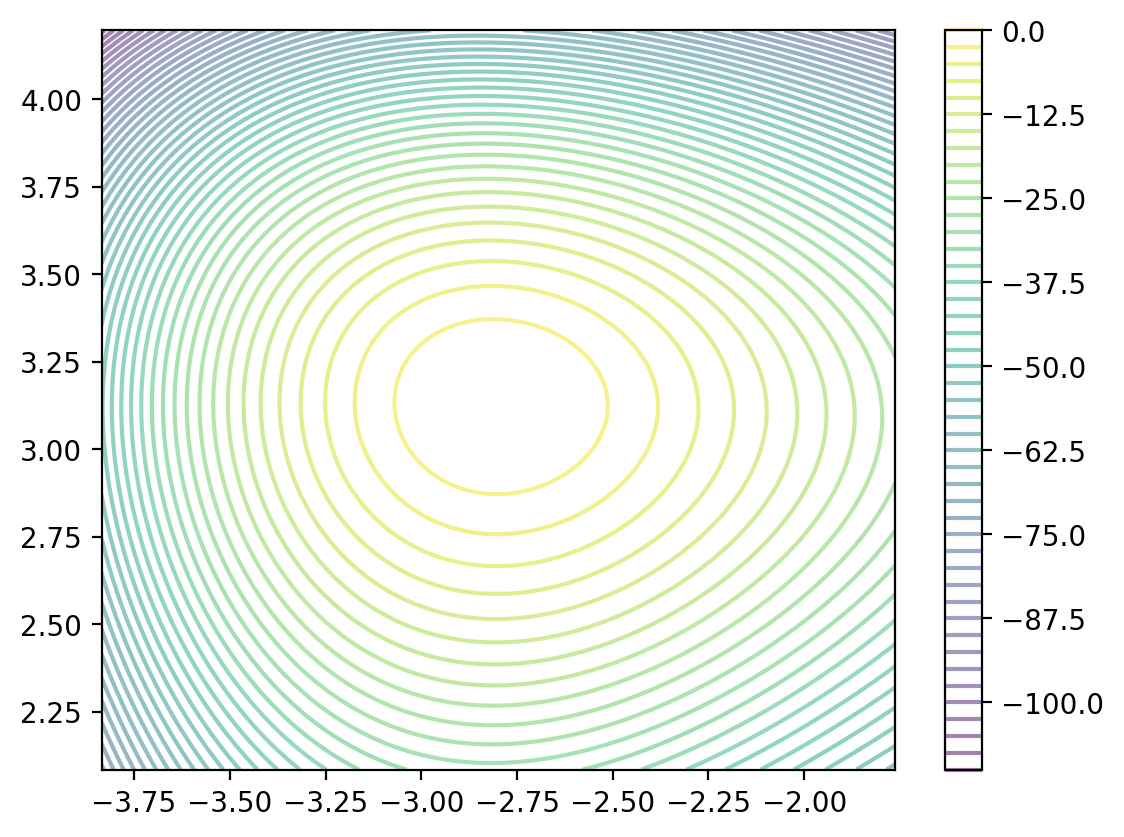
[ ]:
data = y_hat_T
mort: Sequence[Sequence[float]] = data
assert len(mort[0]) == 2
xs: Sequence[float] = [k[0] for k in mort]
ys: Sequence[float] = [k[1] for k in mort]
x_min = np.min(xs)
x_max = np.max(xs)
y_min = np.min(ys)
y_max = np.max(ys)
oplot.contour(lambda x, y: OBJECTIVE((x, y)), # type: ignore[reportArgumentType]
x_range=(x_min-1, x_max+1),
y_range=(y_min-1, y_max+1))
[ ]:
ConvexHull
[ ]:
def diameter(, measure: Callable[]) -> float:
[ ]:
hull.simplices
array([[1079, 484, 32],
[1412, 469, 518],
[1412, 1290, 133],
[1412, 1109, 1290],
[ 160, 1079, 1271],
[ 160, 1079, 32],
[ 160, 484, 518],
[ 160, 484, 32],
[1473, 160, 1271],
[1236, 511, 121],
[ 810, 121, 674],
[ 910, 334, 469],
[ 910, 1412, 133],
[ 910, 1412, 469],
[1315, 639, 17],
[1315, 615, 639],
[1315, 484, 518],
[1315, 615, 518],
[ 751, 1079, 484],
[ 751, 1315, 17],
[ 751, 1315, 484],
[1507, 615, 674],
[ 8, 469, 518],
[ 8, 615, 518],
[ 427, 160, 518],
[ 427, 1473, 1109],
[ 427, 1473, 160],
[ 826, 821, 1254],
[ 804, 826, 1238],
[ 804, 826, 821],
[ 718, 640, 334],
[ 718, 895, 218],
[ 718, 810, 121],
[ 718, 511, 121],
[ 718, 895, 511],
[ 196, 121, 674],
[ 196, 1448, 674],
[ 196, 1236, 121],
[ 196, 1236, 1448],
[ 83, 1236, 511],
[ 83, 804, 1238],
[ 83, 804, 511],
[1536, 810, 334],
[1536, 534, 334],
[ 830, 910, 133],
[ 830, 910, 334],
[ 830, 640, 133],
[ 830, 640, 334],
[1221, 751, 1079],
[1221, 751, 17],
[1221, 1079, 152],
[ 157, 8, 615],
[ 157, 8, 534],
[ 157, 615, 674],
[ 157, 534, 674],
[1299, 534, 334],
[1299, 8, 534],
[1299, 334, 469],
[1299, 8, 469],
[ 99, 1412, 518],
[ 99, 427, 518],
[ 99, 1412, 1109],
[ 99, 427, 1109],
[ 503, 639, 17],
[ 503, 1221, 17],
[1172, 826, 1254],
[1172, 826, 1238],
[1172, 1236, 1448],
[1172, 83, 1238],
[1172, 83, 1236],
[1172, 615, 639],
[1172, 1507, 615],
[1242, 810, 334],
[1242, 718, 334],
[1242, 718, 810],
[1581, 810, 674],
[1581, 1536, 810],
[1581, 534, 674],
[1581, 1536, 534],
[ 277, 718, 848],
[ 277, 102, 1290],
[ 228, 503, 581],
[ 228, 503, 1221],
[ 228, 581, 152],
[ 228, 1221, 152],
[ 400, 1473, 1271],
[ 400, 1460, 1290],
[ 400, 1109, 1290],
[ 400, 1473, 1109],
[1419, 102, 1290],
[1419, 1460, 1290],
[1419, 277, 102],
[ 204, 804, 511],
[ 211, 1559, 234],
[ 211, 566, 450],
[1170, 804, 821],
[1170, 234, 821],
[1170, 1559, 234],
[1170, 204, 804],
[1170, 204, 511],
[1170, 1419, 1559],
[ 425, 581, 152],
[ 425, 894, 152],
[ 425, 894, 581],
[ 600, 894, 152],
[ 600, 1079, 152],
[ 600, 566, 1079],
[1379, 894, 581],
[1379, 821, 1254],
[1379, 581, 1254],
[1379, 234, 821],
[1379, 894, 234],
[ 648, 581, 1254],
[ 648, 1172, 1254],
[ 648, 503, 581],
[ 648, 503, 639],
[ 648, 1172, 639],
[ 584, 1448, 674],
[ 584, 1172, 1448],
[ 584, 1507, 674],
[ 584, 1172, 1507],
[ 553, 718, 640],
[ 553, 277, 718],
[ 553, 640, 133],
[ 553, 1290, 133],
[ 553, 277, 1290],
[ 38, 211, 450],
[ 38, 1419, 1559],
[ 38, 211, 1559],
[ 898, 1261, 218],
[ 898, 895, 218],
[ 898, 895, 511],
[ 713, 1170, 511],
[ 713, 1170, 1261],
[ 713, 898, 511],
[ 713, 898, 1261],
[ 132, 1170, 1419],
[ 132, 718, 218],
[ 132, 718, 848],
[ 132, 277, 848],
[ 132, 1419, 277],
[ 961, 894, 234],
[ 961, 600, 894],
[ 961, 600, 566],
[ 961, 211, 234],
[ 961, 211, 566],
[ 365, 400, 1460],
[ 365, 38, 400],
[ 365, 1419, 1460],
[ 365, 38, 1419],
[ 30, 400, 1271],
[ 30, 1079, 1271],
[ 30, 566, 1079],
[1093, 1170, 1261],
[1093, 132, 1170],
[1093, 1261, 218],
[1093, 132, 218],
[1421, 30, 566],
[ 320, 30, 400],
[ 320, 1421, 30],
[ 320, 38, 400],
[ 320, 1421, 38],
[ 270, 38, 450],
[ 270, 1421, 38],
[ 270, 566, 450],
[ 270, 1421, 566]], dtype=int32)
[ ]: