Linear Genetic Programming
Linear genetic programming (LGP) is an evolutionary programming paradigm. This paradigm represents the program as a sequence of instructions, where each sequence is either an operation

or a control structure

Since the topic is complex, this tutorial has two parts:
Running LGP demonstrates a use case of linear genetic programming.
Exploring the Backstage shows how pieces of the module work together – a custom interpreter, the scope, and
Running LGP
An LGP algorithm optimises linear genetic programs. Each program has instructions that operate on registers. These registers can be one of the following:
Variable registers (or simply registers) can be assigned to. These registers initialise to inputs of the program. Outputs of the program are taken from these registers when the program halts.
Constant registers (or simply constants) are fixed.
Like any machine learning paradigm, LGP learns from fitness cases. Each fitness case has the following form
(inputs: Sequence[Number], output: Number).
Let’s generate some!
[23]:
from evokit.evolvables.primitives import add, sub, mul, div, sin, cos
import random
ASSURANCE_CASE_COUNT = 20
REGISTER_COUNT = 2
CONSTANT_COUNT = 4
registerses = [[random.random() for _ in range(REGISTER_COUNT)] for _ in range(ASSURANCE_CASE_COUNT)]
constantses = [(0., 1., 2., -1.) for _ in range(ASSURANCE_CASE_COUNT)]
def demo_function(registers: list[float], constants: tuple[float,
float,
float,
float]) -> list[float]:
r = registers.copy()
c = constants
r[0] = r[0] * c[1]
r[0] = r[0] + c[1]
if r[1] < c[0]:
r[1] = sin(r[0])
r[1] = r[1] * 5
return r
inputs = list(zip(registerses, constantses))
outputs = [[demo_function(registers, constants)[0]]
for registers, constants in inputs]
[24]:
fitness_cases = list(zip(inputs,
outputs))
Let MSE be the error function, and run the algorithm.
[25]:
from evokit.evolvables.lgp import LGPEvaluator, LinearGeneticProgram, Crossover, LGPFactory
from evokit.core import Population
from evokit.evolvables.algorithms import SimpleLinearAlgorithm
from evokit.evolvables.lgp import LGPEvaluator, Crossover
from evokit.evolvables.selectors import TruncationSelector
from typing import Sequence
def maybe_mse(xs: Sequence[float],
ys: Sequence[float]):
return -sum((abs(x - y)**2
for x, y in zip(xs, ys)))
IND_SIZE = 2
POP_SIZE = 40
factora = LGPFactory(
primitives=[add, sub, mul, div, sin, cos],
register_count=REGISTER_COUNT,
constant_count=CONSTANT_COUNT,
)
OUTPUT_INDEX = 1
pop: Population[LinearGeneticProgram] = Population(
[factora.build_fully_effective(segment_length=IND_SIZE,
output_indices={0})
for _ in range(POP_SIZE)]
)
evaluator = LGPEvaluator(fitness_cases=list(fitness_cases),
fitness_function=maybe_mse,
optimise_mode="mask",
output_indices={1},)
variator = Crossover(k=4,
allow_repeat=False,
even=False)
selector = TruncationSelector(budget=POP_SIZE)
algo = SimpleLinearAlgorithm(population=pop,
variator=variator,
evaluator=evaluator,
selector=selector)
[26]:
from typing import Callable
import time
from evokit.watch.watchers import create_fitness_watcher
from evokit.watch.visual import plot
WATCHER_TIMER: Callable[[], float] = time.perf_counter
default_watcher_settings = {
"events": "STEP_END",
"watch_post_step":True,
"timer": WATCHER_TIMER
}
fitness_watcher = create_fitness_watcher(**default_watcher_settings)
algo.register(fitness_watcher)
[27]:
for _ in range(90):
algo.step()
[28]:
algo.population[9].genome
[28]:
[r[0] <- mul(r[0], c[2])]
[29]:
fitness_watcher[0]
[29]:
WatcherRecord(event='POST_STEP', generation=0, value=(-9.947176653760536,), time=2453533.1587268)
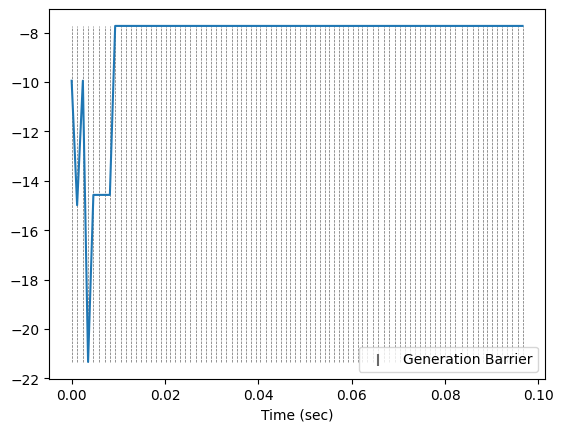
See the result.
[30]:
plot(fitness_watcher, show_generation=True, use_line=True)
Exploring the Backstage
[31]:
import evokit.evolvables as evolvables
[32]:
import evokit.evolvables.lgp as lgp
from evokit.evolvables.lgp import cells
View register values of a program.
[33]:
program = lgp.RegisterStates(registers = [3, 4, 5, 6],
constants = (7, 8, 9, 10, 11))
print(program)
LGP execution context here. Register states:
> r[3, 4, 5, 6], c(7, 8, 9, 10, 11)
Implement this program:
